
By L. George Lawrence
Tactile systems may provide an answer to some space-age communications problems. Research into the theory has been stepped up by both military and industrial groups.
IN a tumbling spacecraft, an astronaut may have to perform a hundred tasks before he brings his capsule under control — all the while attempting to maintain communications with Flight Control. Deep sea divers who have been given helium-oxygen mixtures produce unintelligible words that sound like ducks quacking. In both cases, a communications system that didn't depend on the spoken word or visual recognition would be a help.
Recently, military and space scientists have accelerated research into the utilization of the skin as a tactile communications receiver or as an interface between men and machines. Studies have shown that the skin of a normal adult contains some 1.2 million pain, 700,000 pressure, 250,000 cold-spot, and 30,000 hot-spot receptors. Of these, the pressure receptors are the most useful for tactile communications purposes. The hot and cold receptors are "out" because rapid temperature cycling equipment is not available; and obviously, the use of the pain receptors borders on barbarism.
The most developed of tactile communications systems is still very primitive. Scientists have much to learn about the human nervous system. Whether a sensation is "hot" or "cold" or whether it is "pressure" or "pain ", is determined deep within the nervous system and it requires great concentration on the part of the subject to differentiate them.
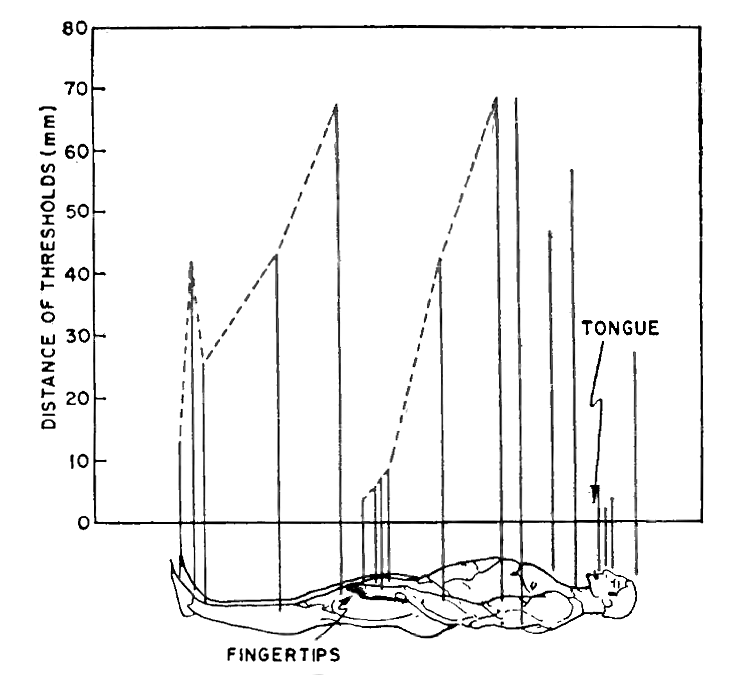
Fig. 1. Tactual sensitivities, expressed in millimeters of displacement, about various points on the human body.
Tactile Stimulators
The tactual sense can be stimulated in various ways but most of the practical methods require mechanical aids and electrical forces. Of the mechanical skin stimulators, vibrating solenoid plungers and airjets create the most useful sensations. However, they have an audible output which can distract the user from his other duties and, thus, have a disadvantage.
Tactual sensitivities at various points of the body are shown in Fig. 1. The tongue and tips of the fingers are the most sensitive to tactual stimuli. In these areas, the receptors are closely spaced.
The data of Fig. 1 was obtained with a touch compass, or "Tasterzirkel", developed by E.H. Weber in Germany about 1834. The device, which resembles a compass with sharp points, is placed atop the skin and, by noting the spread of its two legs, it is possible to determine the proximity of those receptor points which discriminate between two distinct impressions. A bent piece of wire will serve the same purpose. Pressing its two ends against the upper leg makes the sensation of both impressions seem like one; whereas two similar impressions on the tongue can readily be sensed as two distinctly different points of touch.
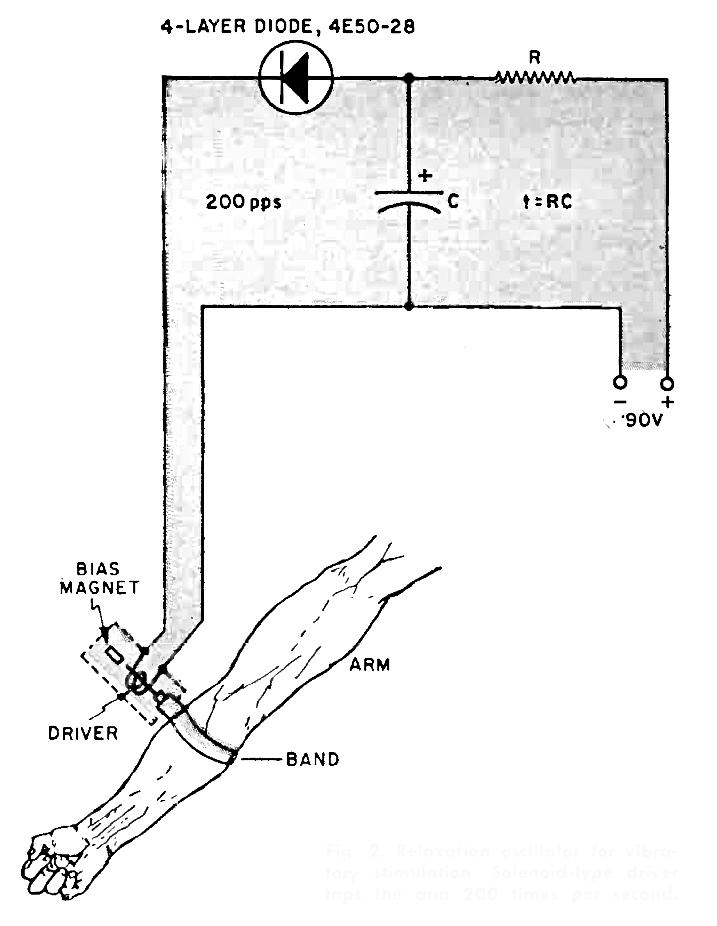
Fig. 2. Relaxation oscillator for vibratory stimulation. Solenoid-type driver taps the arm 200 times per second.
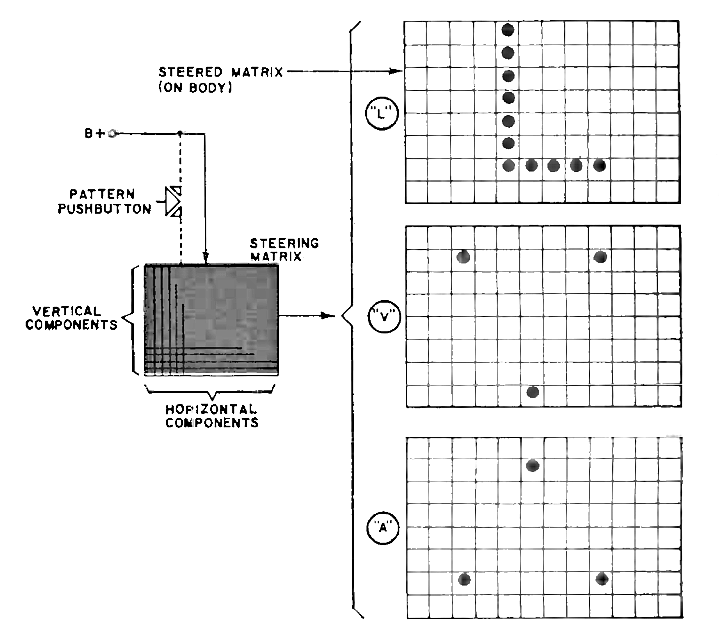
Fig. 3. Steered matrix system for tac ual stimulation. Complex letters must be transmitted (L for example) as complete units. Simple letters such as "A" are sent as abstract facsimiles.
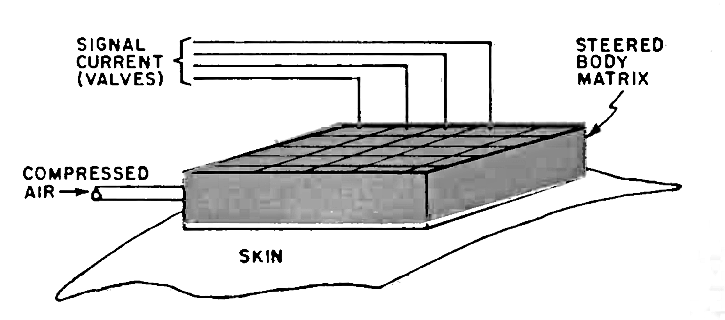
Fig. 4. Signal patterns from steered body matrix atop skin are produced by airjets with electrically activated valve.
However, since both the tongue and tips of the fingers are "out" as far as the attachment of mechanical appendages is concerned, it is necessary to use a more convenient, though less sensitive, part of the human body.
Fig. 2 shows the attachment of a solenoid-type driver to the arm. The device consists of a vibrating plunger and bias magnet which is activated by pulses from a simple relaxation oscillator. This scheme represents a one-point-only stimulation mode. A Morse code can be transmitted — but little else. However, its basic simplicity makes it ideal for emergency applications.
A fairly complete set of data, especially letters of the alphabet, can be transmitted via chest-mounted matrices which contain a large array of identical stimulators. The signaling matrix can be computer or manually controlled to spell out the letter facsimiles. Fig. 3 shows matrices for 96-bit frames and illustrates the letters L, V, and A. With this technique, a trained subject can recognize approximately 15 characters per second.
Airjet devices have also been used to transmit tactual signals. In Fig. 4, compressed air is fed into computer-steered solenoid-activated valves. In both systems it is possible to improve the skin's critical threshold sensitivities by stimulating an adjacent region at the same time.
Tactile Dimensions
The precise area of skin-felt sensations is difficult to investigate and data cannot be derived directly by extrapolating values obtained through the application of Weber's touch compass or esthesiometer.
Mechanical vibrations, unlike static pressures applied to the skin, do not stay "within bounds" and, unless the vibrators are suitably spaced, two or more vibratory inducers acting simultaneously will feel like one. Although a split-second time difference is all that's needed to restore the sensation of two local impressions, the electronic equipment needed to accomplish the time delay can be extensive.
Compared to sinusoidal input vibrations (Fig. 5A), clicks or pulses affect a smaller skin area. But because there are as many skin types as there are types of faces, a combination of Figs. 5A and 5B would be most desirable for the untrained subject.
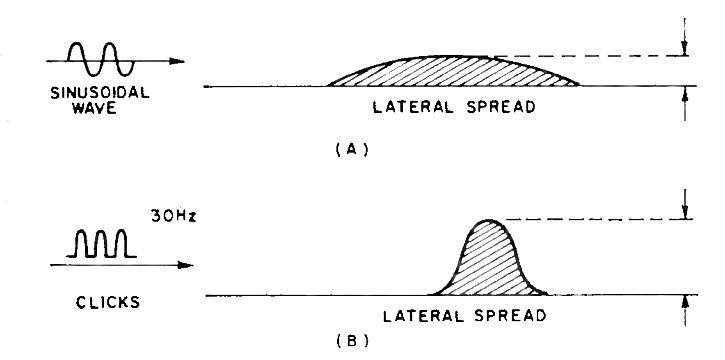
Fig. 5. The magnitude of the sensations from clicks is more intense over a smaller area than those from sinusoidal inputs.
In the fingers, the biological system's internal noise level may be so high that it masks any and all sensations applied to it by an artificial skin inducer.
However, since fingers are easily accessible, scientists are trying to train these appendages to do essentially what the ear's tympanic membrane does — to distinguish sound patterns and pitch. In one experiment where human speech was amplified and applied to the fingers, the subject, with 30 hours' practice, was able to recognize one out of every two words.
Since tactile stimulators generate considerable mechanical force, care must be taken to keep the intensity of the stimulus within safe limits. In the regions of the chest, plunger or trip-hammer vibrators have stimulus amplitudes ranging from 50 to 400 microns. Under these conditions, the subject can discern some 15 intensity steps.
There are, for all practical purposes, no abrupt changes in sensitivity from one small spot of skin to the next. Sensitivity and thus discrimination can be increased by cooling or heating the skin with an ethyl-chloride spray or an infrared lamp. Heating is more comfortable and produces an immediate awareness of a change.
It should be kept in mind that the application of tactile signaling systems forces the living skin to learn a new language which is quite alien to its natural purpose.
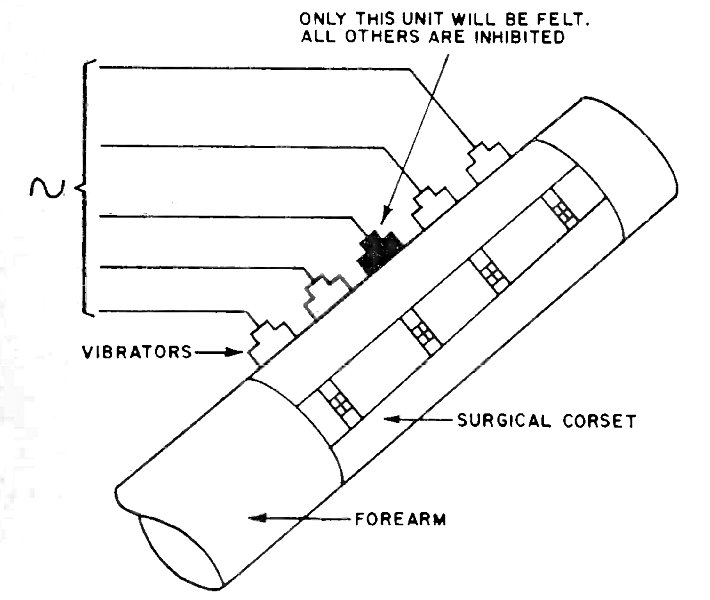
Fig. 6. In a five unit inducer array, only the center unit will be felt. Other vibrators contribute to the intensity of feeling.
Applications
If five vibrators are placed along a line of the skin of the forearm, 2 centimeters apart, and the amplitudes of vibrations adjusted so that they feel equally intense when activated separately, only the vibrator in the array's center will be felt (Fig. 6) when all are activated simultaneously. Pitch sensations of the other units will be completely inhibited. Strangely enough, the intensity of the inhibited outside vibrators increases the loudness of the vibrator in the middle. Von Bèkésy describes this interaction as "funneling". Unfortunately, in standard communications tasks, this phenomenon cannot be tolerated since it leads to a loss of system resolution.
For a tactile communications system to be practical, the apparatus must be designed so that it will not be handicapped by the normal neural inhibition processes. Since this is an extremely difficult problem, the designer should avoid complex coding and, if possible, sensory cues of different frequencies. In most emergency situations, it is unreasonable to expect a harassed individual to pay close attention to various tactile codes and modifications of pitch patterns. In most critical situations, the single-unit, "on-off" stimulator is the only answer.
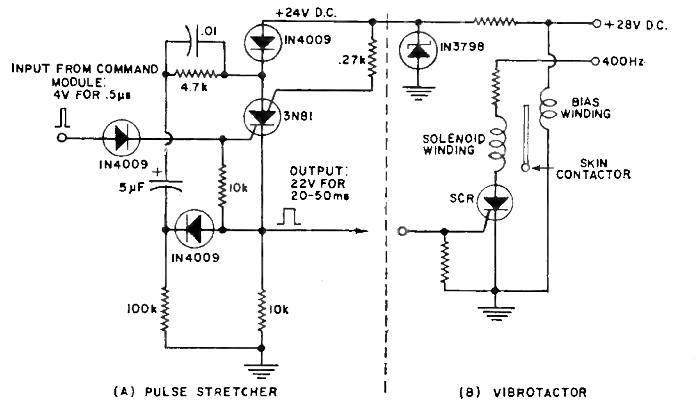
Fig. 7. If the Vibrotactor's drive pulse is too short, a pulse stretcher can be used to extend baseline and drive solenoid.
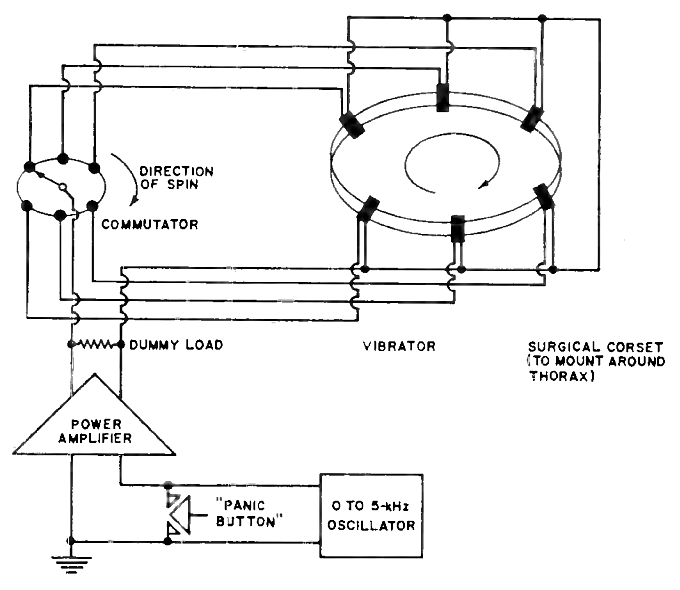
Fig. 8. Thorax-mounted tactile spin inducer can create an artificial whirl in a human observer. Device is suitable for some aeronautical and astronautical warning systems.
Electronic steering of tactile skin contactors can be accomplished by various keying modes. Fig. 7B shows the electronics for the "Vibrotactor", developed by the author as an emergency signal for astronauts. The device consists of a solenoid-type plunger mechanism equipped with d.c. excitation bias. The activation interval is determined by positive pulses applied to the gate of the silicon controlled rectifier (SCR). In the diagram, the system is shown in abbreviated form. During "on" time, the a.c. portion of the solenoid winding is energized and the skin contractor vibrates. The pulse stretcher (Fig. 7A) is an extra feature since it enables short, rapid, high-frequency pulses with very short time bases to activate the Vibrotactor complex. Pulses or taps of the skin contactor shorter than 0.5 microsecond duration cannot be felt by man.
A different and fairly unique form of tactual sensations is experienced when vibratory signals are applied, in rapid succession, to points located some distance from each other. If, for example, a ring of vibrating contactors is placed around the human body — three across the back of the thorax and three across the front — and energized successively with pulses spaced 0.1 second apart, a pronounced swirling motion can be experienced. The triggering scheme is shown in Fig. 8. A "panic button" is included because the phenomenon is confusing and the subject feels as if he were in the center of a whirlpool. He may also become nauseated.
Systems such as these can be of invaluable help in both aeronautical and astronautical situations. The apparatus can indicate, in a rather personal and direct manner, any deviations from course or orbital trajectories. The possible use of semi-coded signaling is of special significance.
However, it should be kept in mind that only mechanical-type vibratory inducers have been investigated in depth and, to date, no practical stimulators are available.
The response of the human skin to pulsating skin forces is not well defined. Basically, as the frequency of alternating currents applied to the skin is increased, there is a rise in the threshold of sensitivity and the investigator experiences sensations ranging from a mild tingle to uncomfortable pain.
References
- Allen, F. and Weinberg, M: "The Tactile Sensory Reflex", Quarterly Journal of Experimental Physiology, 15:377-383 (1925) <http://ep.physoc.org/content/15/4/377.full.pdf+html>
- Kotovsky, K. and Bliss, J.C.: "Tactile Presentation of Visual Information" I.E.E.E. Transactions on Military Electronics, April-July 1963 <http://dx.doi.org/10.1109/TME.1963.4323059>
- von Bèkésy, G.: "Human Skin Perception of Traveling Waves Similar to Those on the Cochlea", Journal of Acoustical Society of America, 27:5, pp. 830-841, 1955 <http://dx.doi.org/10.1121/1.1908050>
- Ibid: "Funneling in the Nervous System and Its Role in Loudness and Sensation Intensity on the Skin", Journal of Acoustical Society of America, 30:5, pp. 399-412, 1958 <http://dx.doi.org/10.1121/1.1909626>
- Bice, R.C.: "Vibratory Tracking", In Progress Report No. 21, ONR Project NR140-598, August 29, 1953
- Howell, W.C.: "Training on a Vibratory Communication System", Master's Thesis, University of Virginia, 1956
- Ibid: "Discrimination of Rate of Amplitude Change in Cutaneous Vibration", Doctoral Dissertation, University of Virginia, 1958
- Saslow, L.: "Tactile Communication with Airjets", Report No. 8768-I, Dept. of Mechanical Engineering, MIT, March 1962
- Gibson, R.H.: "Conditions of Painless Electrical Stimulation of Touch", Eastern Psychological Association Meetings, April 26 -28, 1962
Originally published in "Electronics World" (May 1968). Browse AmericanRadioHistory.com for complete issues of E.W. and many other historical radio and electrical publications in PDF format.
Return to the BIO-ICOMM Project homepage or the Bibliography of L. George Lawrence.